FIRE-FS – Wildfire Picosatellite Constellation & UAVs Remote Sensing: Active fire mapping and management
Project Overview
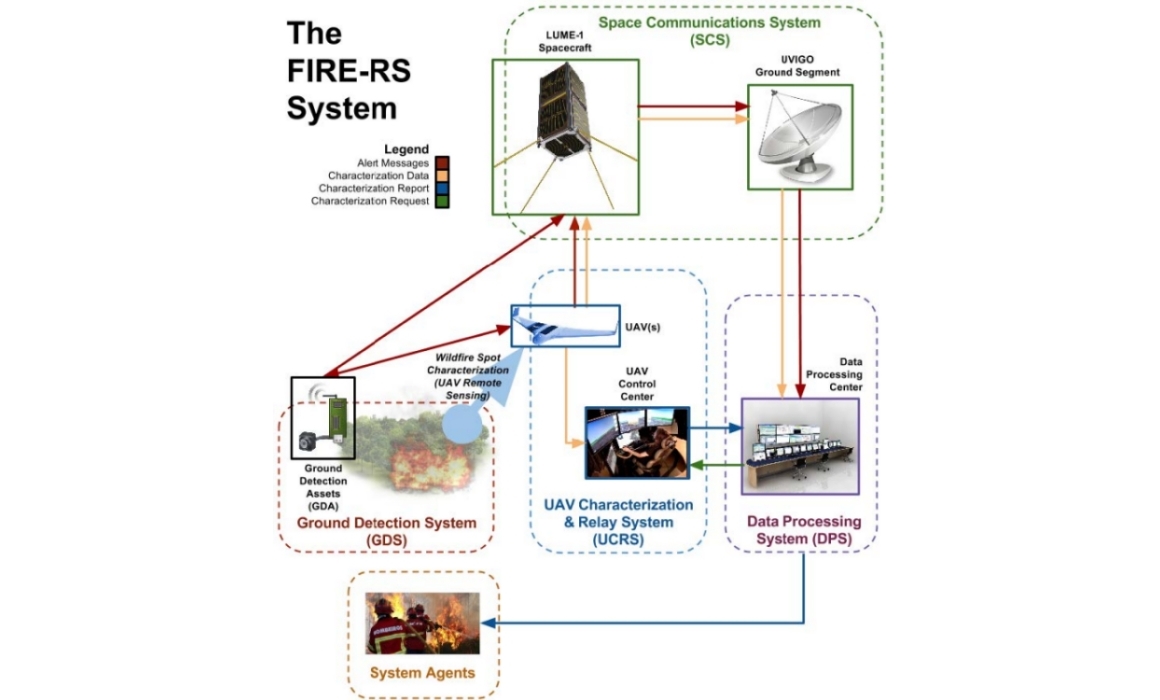
One of the greatest threats and environmental disasters that occur annually in south-west Europe is that of forest fires. FIRE-RS (acronym for wildFIRE Remote Sensing) proposes to reduce their impact by providing emergency agencies and coordination centres with an innovative tool for the early detection and the efficient management of fires. During the project a multidisciplinary and international team will create a platform which by the use of new technologies will give very precise information almost in real time on the perimeter of the fire, its location, and the existing danger. The new platform created in FireRS will provide almost real-time information, GPS positioning, fire perimeter, infrared images, propagation prediction, performance protocols, etc. The set consists of ground sensors, a dedicated picosatellite, a local and remote ground station as well as a mission control center.
Project Results
One of the main objectives of FireRS is to regularly provide fire responders with an up-to-date overview of the situation, and in particular of the localization and extent of the fire front. For this purpose, the Situation Assessment and Observation Planning (SAOP) subsystem plays two roles: it first integrates the information gathered by the land sensors and UAVs into a Fire Map, and then exports this Fire Map to predict the evolution of the fire, and define the observation trajectories to be achieved by the UAVs, so as to maximize the precision and timeliness of the gathered information.
The latest work developed by the FireRS team at LAAS-CNRS was to include the wind effect in UAV motion, and the trajectory optimization algorithm has been refined. Mapping algorithms are being developed to build the Fire Maps from infrared images.
LAAS-CNRS and LSTS are now collaborating tightly, working to integrate SAOP planned missions into the UAV Command and Control Software, and on monitoring the execution of these plans. First integration tests with simulated UAVs are being carried out, testing with UAVs is expected to happen in the next months.The CIMA Group of the University of Vigo finished the tuning of the Land Sensor of the FireRS Project. The device has an infrared sensor and a video camera, both long-range. The temperature detection threshold of the sensor can be configured to send an alert from any temperature above 0ºC and with a tolerance of ± 1ºC
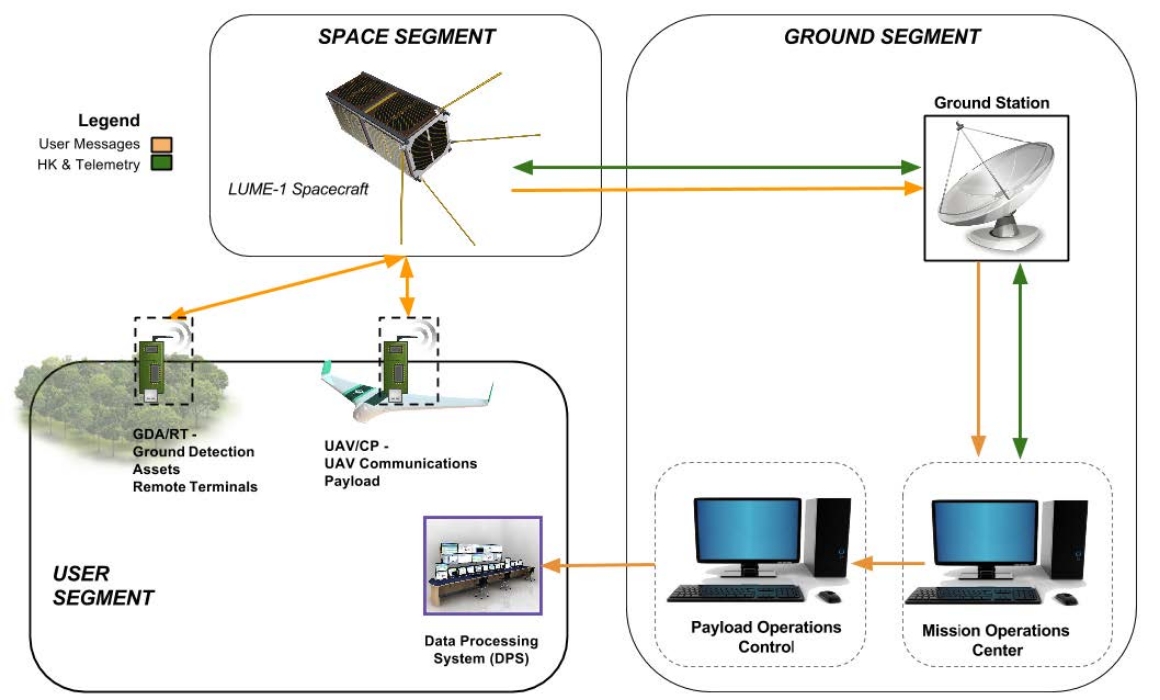
Once an operation temperature within the established range is detected, the sensor will send an alarm to the Lume-1 satellite of the FireRS project, which will start the emergency operations plan according to the protocols set.
The fourth satellite developed by the University of Vigo, Lume-1, will be placed in orbit on December 27 within a Soyuz spacecraft from the Russian space base of Vostochny, in Siberia. It will be inserted in orbit and the first pass through Vigo is scheduled for 11.00 in the morning. Everything is ready for the big moment and, although at first the official release date was December 25, it was already said that there could be last minute modifications due to weather issues.
Under the FireRS project, the Lume-1 is a U2 type cubesat satellite, with dimensions 200x100x100 mm and a weight of 2.1 kilograms. Its mission will be to provide bidirectional communication support to land sensors that detect fire, as well as establish a connection with drones developed by the University of Porto.
Website
http://www.fire-rs.com/es/Resources
Images
{kind=link}
{kind=link}
Links
- https://www.keep.eu/project/18329/wildfire-picosatellite-constellation-uavs-remote-sensing-active-fire-mapping-and-management
- https://www.interreg-sudoe.eu/gbr/projects/the-approved-projects/143-wildfire-picosatellite-constellation-uavs-remote-sensing-active-fire-mapping-and-management
Contacts
Dr Fernando Aguado Agelet
Universidade de Vigo
Spain
Tel: + 34 986 818 748
E-mail: faguado@uvigo.es
infor@fire-rs.com